- Đăng vào
Điều khiển LQR mô hình con lắc ngược
Bài viết này sẽ hướng dẫn các bạn điều khiển mô hình con lắc gắn trên xe bằng bộ điều khiển LQR trên Matlab. Đầu tiên mình sẽ phân tích để tìm ra phương trình trạng thái của hệ thống sau đó viêt code mô phỏng trong matlab.
Mô hình hệ thống
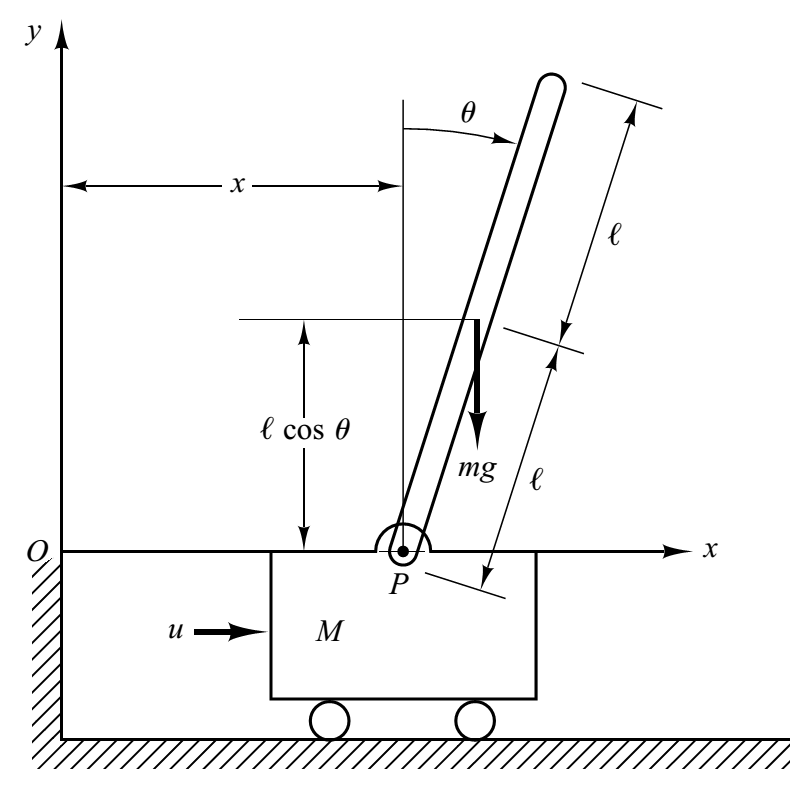
Trong đó:
- là lực tác dụng lên xe
- là vị trí của xe
- là góc nghiêng của con lắc
- là khối lượng của con lắc
- là khối lượng của xe
- là moment quán tính của con lắc.
- là chiều dài của con lắc ngược
Phương trình động lực học
Phương pháp 1
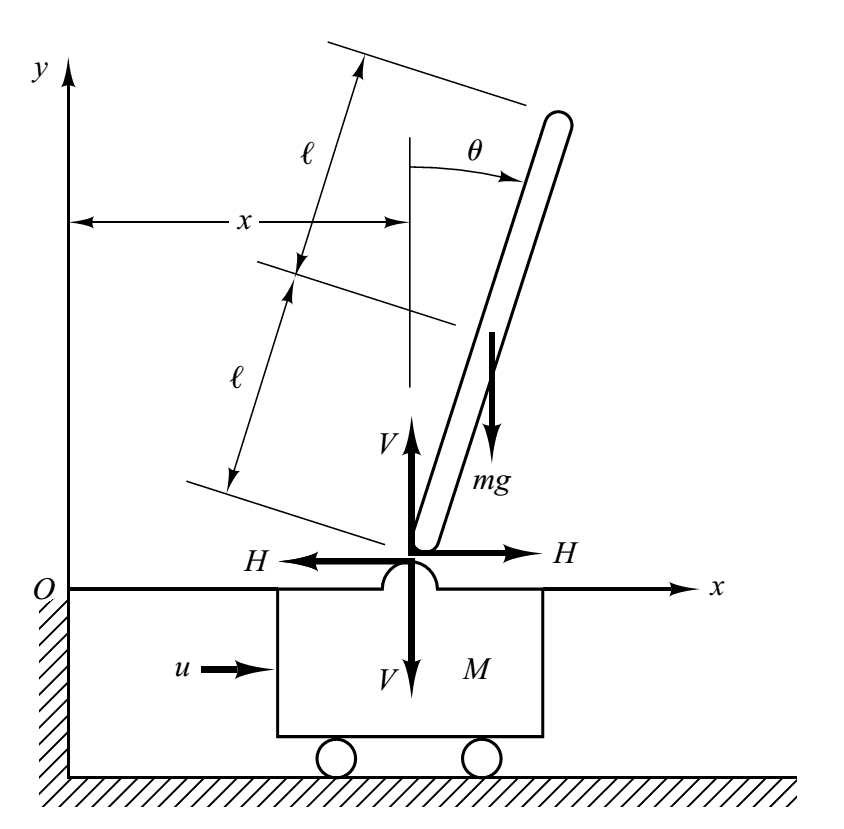
Áp dụng các định luật Newton
Phân tích lực tác động lên từng thành phần của hệ thống là xe và con lắc. Tại khớp nối sẽ xuất hiện các cặp phản lực tương ứng triệt tiêu nhau là và .
Giả sử con lắc có dạng thanh thẳng đồng chất, trọng tậm nằm ở chính giữa thanh với tọa độ::
Con lắc chuyển động xoay quanh trọng tâm và chuyển động theo xe: Chuyển động xoay:
Chuyển động theo phương ngang:
Chuyển động theo phương đứng:
Phương trình chuyển động của xe:
Mục tiêu điều khiển là duy trì con lắc nằm ở phương thẳng đứng, chúng ta giả sử rằng và nhỏ nên có thể xem .
Phương trình động lực học của hệ thống:
Kết hợp (5) và (7) ta được:
Kết hợp (6), (7) và (8) :
Phương pháp 2
Áp dụng phương trình Euler-Lagrange (đang cập nhật)
Laplace 2 vế của (9) và (10):
Bộ điều khiển LQR
Đang cập nhật
Code Matlab
Inverted_Pendulum.m
%Single Link Inverted Pendulum Control
clc;
clear all;
global A B C D;
%Single Link Inverted Pendulum Parameters
g=9.8;
M=1.0;
m=0.1;
L=0.5;
% Fc=0.0005;
% Fp=0.000002;
I=1/12*m*L^2;
l=1/2*L;
t1=m*(M+m)*g*l/[(M+m)*I+M*m*l^2];
t2=-m^2*g*l^2/[(m+M)*I+M*m*l^2];
t3=-m*l/[(M+m)*I+M*m*l^2];
t4=(I+m*l^2)/[(m+M)*I+M*m*l^2];
A=[0,1,0,0;
t1,0,0,0;
0,0,0,1;
t2,0,0,0];
B=[0;t3;0;t4];
C=[1,0,0,0;
0,0,1,0];
D=[0;0];
% Declare the LQR controller
Q=[1,0,0,0; %100,10,1,1 express importance of theta,dtheta,x,dx
0,1,0,0;
0,0,1,0;
0,0,0,1];
R=[5];
% Calculate gain of LQR
K=lqr(A,B,Q,R);
e1_1=0;
e2_1=0;
e3_1=0;
e4_1=0;
u_1=0;
% xk=[-10/57.3,0,0.20,0]; %Initial values
%xk=[-0.4,0,0.20,0];
xk=[0,0.5,0,0];
ts=0.01;
for k=1:3000
time(k)=k*ts;
Tspan=[0 ts];
control_input=u_1;
[t,x]=ode45('pendulum',Tspan,xk,[],control_input);
length(xk)
xk=x(length(x),:);
r1(k)=0; %Pendulum Angle
r2(k)=0; %Pendulum Angle Rate
r3(k)=1; %Car Position
r4(k)=1; %Car Position Rate
x1(k)=xk(1);
x2(k)=xk(2);
x3(k)=xk(3);
x4(k)=xk(4);
e1(k)=r1(k)-x1(k);
e2(k)=r2(k)-x2(k);
e3(k)=r3(k)-x3(k);
e4(k)=r4(k)-x4(k);
% Design different controllers
u(k)=K(1)*e1(k)+K(2)*e2(k)+K(3)*e3(k)+K(4)*e4(k);
if u(k)>=10
u(k)=10;
elseif u(k)<=-10
u(k)=-10;
end
e1_1=e1(k);
e2_1=e2(k);
e3_1=e3(k);
e4_1=e4(k);
u_1=u(k);
end
figure(1);
subplot(411);
plot(time,r1,'k',time,x1,'k'); %Pendulum Angle
xlabel('time(s)');ylabel('Angle');
subplot(412);
plot(time,r2,'k',time,x2,'k'); %Pendulum Angle Rate
xlabel('time(s)');ylabel('Angle rate');
subplot(413);
plot(time,r3,'k',time,x3,'k'); %Car Position
xlabel('time(s)');ylabel('Cart position');
subplot(414);
plot(time,r4,'k',time,x4,'k'); %Car Position Rate
xlabel('time(s)');ylabel('Cart rate');
figure(2);
plot(time,u,'k'); %Force F change
xlabel('time(s)');ylabel('Force');
grid on;
pendulum.m
function dx=pendulum(t,x,flag,control_input)
global A B C D;
u=control_input;
dx=zeros(4,1);
%State equation for one link inverted pendulum
dx=A*x+B*u;
end